
Il circuito del driver del BJT presenta l’opportunità di ridurre le perdite e migliorare l’efficienza del sistema. Il driver fa due cose: carica e scarica rapidamente la capacità di gate per consentire uno switching veloce, e assicura un continuo flusso di corrente di base per mantenere in saturazione il transistor nello stato ON.
Per supportare il funzionamento dinamico del dispositivo, l’applicazione al driver di una tensione di 15 V porta a transitori più veloci migliorandone le performance. La tensione di soglia del BJI SiC è di circa 3 V. Per aumentare l’immunità non c’è solitamente bisogno di una tensione negativa del gate drive né di clampare mediante effetto Miller.
Il BJT SiC è un dispositivo che si trova normalmente nello stato OFF e viene attivato solo quando viene fornita una corrente di base continua. La scelta del valore di questa corrente di base per il funzionamento statico comporta la ricerca di un compromesso tra le perdite di conduzione e le perdite nel driver. Queste ultime sono sempre importanti nel BJT SiC nonostante i superiori valori di guadagno (e quindi correnti di base inferiori) dal momento che la banda proibita più ampia del formato SiC richiede una maggiore tensione forward tra la base e l’emettitore. Raddoppiare la corrente di base da 0,5 a 1 A abbassa la resistenza equivalente solamente del 10%, pertanto occorre ridurre le perdite di conduzione spostando contemporaneamente la saturazione a livelli elevati. Questa è una considerazione importante per il nostro convertitore step-up dal momento che esso funziona con superiori livelli di ripple di corrente. Una corrente di base di 1 A aumenta la capacità di commutazione a 40 A.
Le perdite statiche nel driver sono una funzione della tensione del gate driver e della tensione di ingresso (che indirettamente implica il valore di duty cycle). Una tensione del gate driver pari a 15 V, necessaria a permettere velocità di commutazione elevate, produce una perdita di quasi 8 W, concentrata soprattutto sulla resistenza di base. Per compensare questa perdita possiamo usare due diverse tensioni dedicate rispettivamente al funzionamento dinamico e a quello statico. Lo schema è fornito in Figura 1. Il segnale di controllo per il driver ad alta tensione viene sottoposto a chop per risultare abilitato solamente durante il transitorio di commutazione. Lo stadio statico viene invece alimentato da una tensione inferiore che ne riduce le perdite statiche, e resta attivato durante l’intero periodo di turn-on.
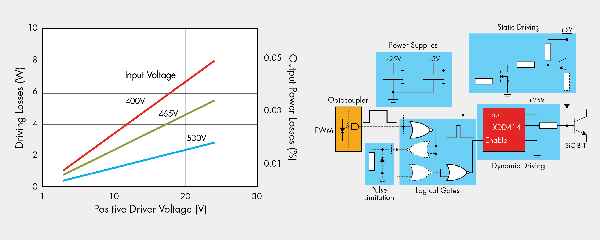
Figura 1. L’impiego di due tensioni di alimentazione riduce le perdite